Dit artikel beschrijft hoe de Handyscope HS4 DIFF USB-oscilloscoop samen met de CAN-decoder-I/O en J1939-decoder I/O in de TiePie engineering Multi Channel oscilloscoop-software is gebruikt om SAE J1939-communicatieproblemen op te lossen in een dieselmotoraangedreven bluswaterpompsysteem op een offshore gasplatform.
Introductie

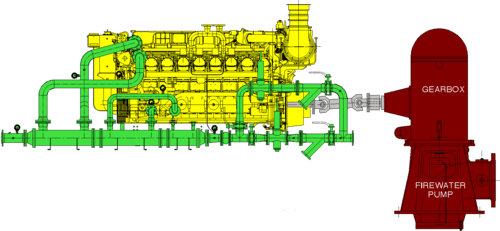
135 km noordwestelijk van Karratha (Australia) in de Indische oceaan is een nieuw gasplatform gebouwd. Essentiële veiligheidsmaatregelen op offshore-faciliteiten omvatten betrouwbare bluswaterpompen die bij brand voldoende water kunnen leveren. Het nieuwe platform is uitgerust met twee mechanische bluswaterpompen. Iedere eenheid bestaat uit:
- een Caterpillar D 3516 C marine motor, een 16 cylinder electronisch gestuurde (ADAM 3) dieselmotor die 2350 kW levert bij 1800 RPM, geleverd door PON-CAT. In noodsituaties werkt deze motor in "run to destruct"-mode. Alleen een noodstop of een toerentaloverschrijding stoppen de motor, alle andere signalen stellen alleen een alarmmelding in werking.
- een tandwieloverbrenging met 4:7-verhouding
- een Sulzer-pomp, in staat 4600 m3 water per uur (1278 l/s) te verplaatsen, bij 1.2 MPa (12 bar) druk, wanneer de motor op 88% vermogen draait
- een Topec bedieningspaneel met Modbus- en CAN-buscommunicatie (SAE J1939), een touch screen voor bediening en een koppeling met een Distributed Control System (DCS) op het platform.
Probleembeschrijving
De installaties die gebruikt worden op een platform worden wereldwijd geproduceerd. Wanneer het platform gebouwd wordt, worden al deze delen verzameld en samengevoegd tot een grote offshore-faciliteit. Als de onderdelen verbonden zijn, begint het ingebruiknametraject waarin alle verbindingen tussen de diverse onderdelen getest worden op juiste werking. Tegenwoordig bestaan die verbindingen uit geavanceerde bussystemen als Profibus, Modbus, CAN-bus, J1939, HART of fieldbus. Bij foutzoeken in deze systemen is een digitale multimeter niet langer toereikend om een probleem te analyseren en lokaliseren. Het volgende voorbeeld laat zien hoe potentiële problemen en hun oorzaak gelokaliseerd kunnen worden met behulp van een oscilloscoop.
Een van de problemen die werden gevonden bij de ingebruikname van het bluswaterpompsysteem was dat twee waarden van de motorstatus niet juist werden doorgegeven aan het DCS. Als gevolg daarvan kon dit gedeelte van het DCS / bluswaterpompsysteem niet afgetekend worden.
De motor is uitgerust met veel sensoren die hun analoge signalen aan de Engine Control Unit (ECU) doorgeven. Die gebruikt deze signalen om de motor te besturen en motorstatus aan de operator door te geven, via het besturingspaneel. De ECU communiceert met het besturingspaneel via een CAN-bus met J1939-protocol. Het besturingspaneel ontvangt de signalen en toont die via het scherm aan de gebruiker en stuurt ze door naar het DCS via een Modbus-communicatieverbinding.
De waarden van deze specifieke sensoren waren beschikbaar in de ECU, maar werden niet getoond op het besturingspaneel. Andere sensorwaarden werden wel juist getoond, waarna de conclusie werd getrokken dat de CAN-bus met J1939-protocol naar behoren werkte. Dus ofwel de gewenste waarden waren niet beschikbaar op de bus, of er ging iets mis in het besturingspaneel.
Meten

Om uit te zoeken of de J1939-waarden aanwezig waren op de CAN-bus, moest de communicatie op de bus worden onderzocht. SAE J1939 is een protocol boven op het CAN-protocol en J1939-boodschappen zijn gecodeerd in extended CAN-berichten. Een CAN-bus gebruikt differentiële signaallijnen om CAN-boodschappen serieel te versturen.
Een Handyscope HS4 DIFF werd aangesloten op de CAN-bus. Met zijn differentiële ingangen kan de scoop rechtstreeks worden aangesloten op de differentiële lijnen van de CAN-bus om het differentiële communicatiesignaal te meten. De CAN-decoder-I/O in de Multi Channel oscilloscoop-software werd gebruikt om de CAN-signalen te analyseren en de CAN-berichten te decoderen. De J1939-decoder-I/O werd gebruikt om de J1939-specifieke informatie uit de CAN-berichten te decoderen en de gewenste waarden te tonen.
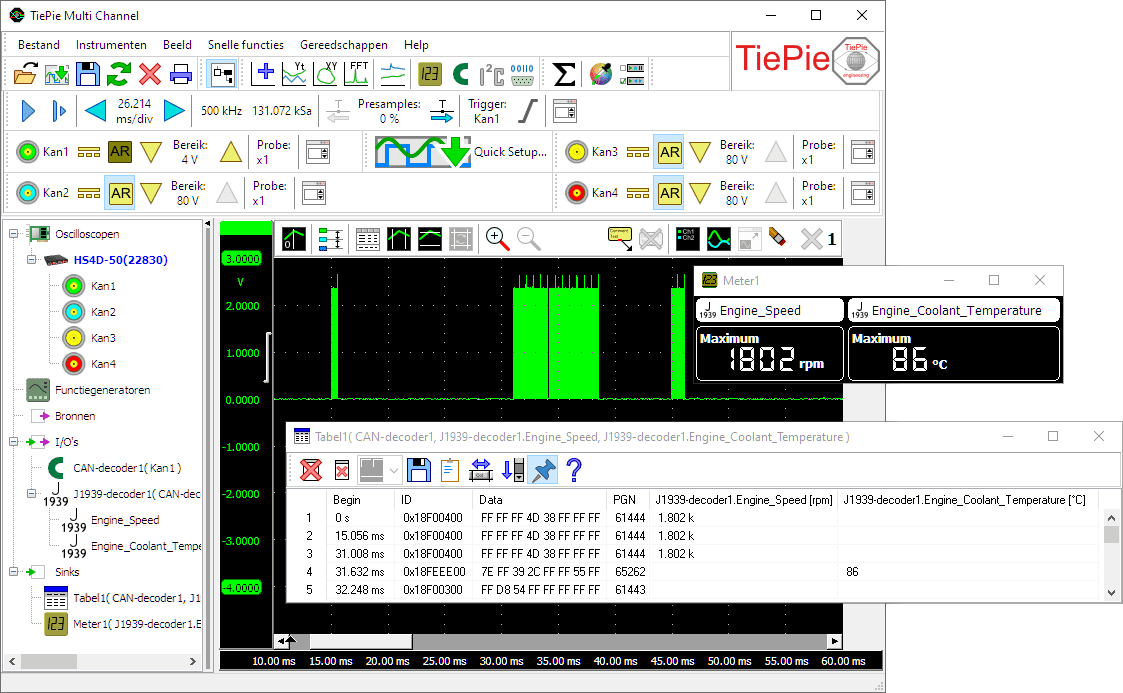
Figuur 4 toont het differentiële CAN-signaal, gemeten door de Handyscope HS4 DIFF. De gedecodeerde CAN-berichten zijn weergegeven in de tabel. De uit de CAN-berichten gedecodeerde J1939-waarden zijn aan de tabel toegevoegd en worden ook in het meterscherm weergegeven.
Oorzaak en oplossing
De gedecodeerde J1939-waarden komen overeen met de waarden in de ECU, dus de juiste waarden waren aanwezig op de CAN-bus. Het bedieningspaneel werd toen onderzocht en het bleek dat de communicatie-PLC van het bedieningspaneel niet juist was ingesteld, waardoor deze specifieke waarden niet werden getoond. Na corrigeren van de instelling, was het probleem opgelost en werden de waarden juist weergegeven op het bedieningspaneel en DCS. Hiermee kon het systeem worden afgetekend als getest en werkend.
Conclusie
Bij foutzoeken in seriële communicatiesystemen als CAN-bus en J1939 moeten de juiste gereedschappen worden gebruikt. Een multimeter is niet toereikend, omdat deze alleen kan aangeven of een elektrische verbinding aanwezig is of niet. Met de Handyscope HS4 DIFF samen met de Multi Channel oscilloscoop-software kunnen de elektrische CAN-signalen rechtstreeks worden gemeten en gedecodeerd naar de daadwerkelijke verstuurde waarden. Op dezelfde locatie werd de Handyscope HS4 DIFF ook gebruikt om de amplitude van een magnetische pickup unit (MPU) te controleren om de afstand tot de tandring en de kwaliteit van de tanden te verifiëren, evenals voor andere metingen. Zijn veelzijdigheid, kleine afmetingen en lage gewicht maken de Handyscope HS4 DIFF een ideaal instrument voor offshore service engineers die vaak per vliegtuig, helikopter en schip reizen.
Foto's en informatie door Jurgen van der Veen, international commissioning engineer Topec B.V.